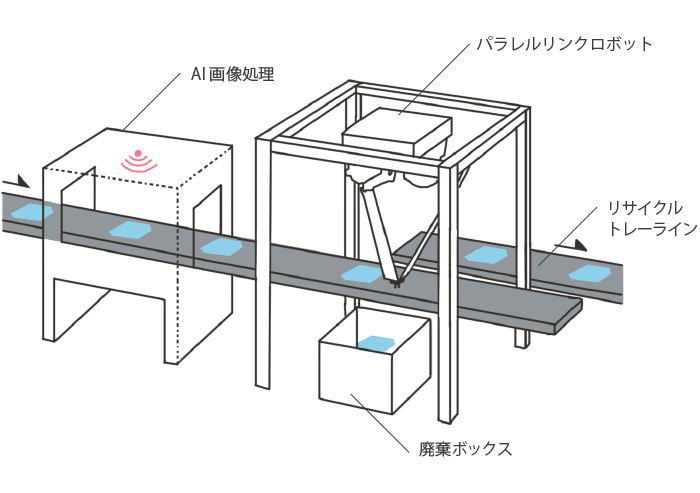
人力で行っていた選別、仕分けの作業を搬送コンベア、AI画像処理、パラレルリンクロボットの組み合わせで自動化を実現。
ワークの長さを測る際、定規で測っているが、時間がかかり誤差も多い。
選別、仕分けの作業を人で行っているため、作業効率が悪く自動化を検討
搬送コンベア、AI画像処理、パラレルリンクロボットの組み合わせで自動化を実現
提灯の和紙に折り目をつけながら畳む工程をオートメーション化することで、人にしかできない作業に時間と技術を費やせる環境を実現
複数名の作業者がコンベアで搬送されてくる断熱材を手作業でストック場所へ運搬する作業を多関節ロボットを活用し自動化を実現
長時間の耐久試験の自動化することで、労働時間の削減と検査品質の安定化を実現